显扬科技—双机协调应用 丨小助协作机器人的无限可能
发布时间:2021-07-30 14:06:03 作者:显扬科技
随着生产环境和操作任务愈发多变,协作机器人唯有不断创新,才能满足多变的生产需要。比如面对同步上下料这样的操作任务,节卡机器人提出双机协调的应用解决方案。
作业对象:手机膜
作业内容:上下料
工艺过程:机器人抓取产品→产品加工→机器人放置产品;
工艺特色:机器人通过双臂协同模式,实现产品的快速上下料。这种并行工作模式,可显著提升生产效率。
与单个协作机器人相比,双臂协作机器人拥有更多的自由度和更大的工作空间,可广泛应用于3C装配、医疗器械、食品包装等生产任务多变的场合。双臂协作机器人不是简单的把两台协作机器人组合在一起,而是需要在双臂间建立通信机制,保证双臂间实时通信。然后再通过复杂的轨迹规划算法,实现双机协调工作。
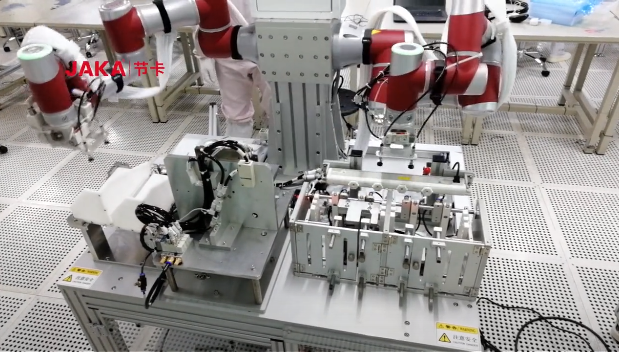
本项目需要机器人将手机膜加工完成后立即取走,仅使用一台机器人无法实现这一工作任务。鉴于此,节卡机器人利用双机实时通信特性,实现两台JAKA Zu 3相互协调,同步完成产品的上料取料,最终取得双机协同工作的突破性进展。
当一台JAKA Zu 3抓取产品后放入工作台进行加工。当产品加工完成,另一台JAKA Zu 3立即取走产品,放入摆料区域,双方互不干扰,同步进行工作,灵活度可比拟人类双手。
24小时工作,实现了 1台替代4个人工,降低了工厂人工成本,也将人从重复性的劳动解放出来;工作节拍高达7s,大大提高了生产效率;厂商计算投资回报周期小于6个月。
双臂协作机器人不仅体积小巧、安装简便,而且配备碰撞保护、无线示教等功能。另外,节卡还可根据项目需求对机器人进行扩展,提升机器人适用性。
此外在这个应用中,充分体现了JAKA Zu 3小巧轻便、能够适应狭小的空间安装、高精度要求的搬运组装等工作特性。轻量化设计让整个应用更贴心,效率更高,客户部署更快、更便捷;超强的协同工作特性,为厂商生产效益带来不可估量的价值贡献。

