扔东西比你还准的优傲机器人
发布时间:2021-06-23 19:15:06 作者:显扬科技
谷歌和普林斯顿基于优傲机器人开发的“TossingBot”可以教会自己抛出比大多数人更准确的任意物体。

“TossingBot”可以通过最少的人为干预来自我掌握和投掷。在很短的时间内,它能够足够精确地操作,可以应用于实际的实际拣货系统。
任何曾经试图学习如何正确地投掷东西的人都可以证明,需要做很多练习才能做到正确。不幸的是,大多数人都没有足够的天赋来获得我们开发的技能,以便出于奇怪的原因将这些技能转化为日常实际任务。但是想象一下,如果我们能够将任意物体扔到任意位置并具有高可靠性,那么我们能够做到这一点,做清洁房间或分拣衣物等事情要容易得多,它会彻底改变像仓库这样的工作环境,它可能会减少所有花在走路上的时间。
现在,谷歌研究人员与来自普林斯顿,哥伦比亚和麻省理工学院的合作者基于优傲机器人一起开发了一种名为“TossingBot”的机器人手臂,它可以教会自己非常准确地拾取和抛掷任意物体。目标是通过优雅高效的投掷替换整个“位置”位,显着加快拾取任务。
一般来说,投掷是一个非常困难的问题,值得注意的是,从一开始人类就会通过几乎总是使用平衡,空气动力学和/或对称的物体来积极地简化投掷。如果编程,机器人可以准确地抛出不平衡或不对称的物体,但通常你必须指定如何单独抓住和抛掷每个物体,找出最佳运动然后指示机器人重复它。
学习抛出任意物体要困难得多,特别是对于自学成熟的机器人 - 即机器人学习拾取东西并通过反复试验抛弃它们而不是被人类明确训练。“TossingBot”值得注意的是,它教导自己能够在最少的人为干预的情况下抓握和投掷,并且在相对较短的时间内,它能够足够快速和准确地操作,以便这些技术可以应用于实际的实际拣选系统。
使TossingBot如此有用的部分原因在于抛掷技术显着减少了机器人在拾放任务的“地点”部分上花费的时间。不是花时间把物体放下来,而是(正如研究人员所说的那样)物体“立即传递”,并且折腾也意味着机器人的有效距离明显长于其物理工作空间。
在每小时超过500件物品的平均拣选率下,TossingBot在效率方面与人类在一起,至少对于它经历过的特定物品组合而言。虽然人类可能总是会更好地处理新奇物品,但TossingBot在新型物品方面表现相当不错。对于TossingBot来说,只需要一两个小时的训练来获得与已知对象类似的 性能,并且它还可以快速学会将东西扔到以前没有训练过的位置。
优傲机器人
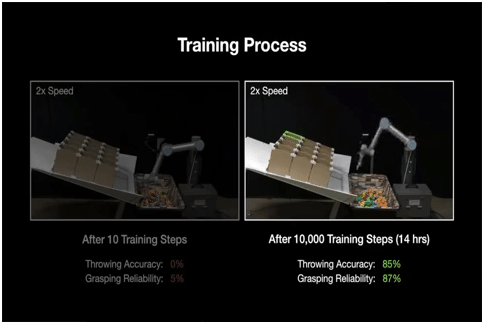
TossingBot本身的一个有趣的部分是一个深度神经网络,它以一个bin中对象的深度图像开始,并从成功的抓取到投掷本身的参数一直进行。由于投掷物体(特别是不平衡物体)在很大程度上取决于它是如何被抓住的,所以同时学习抓握和投掷。通过测量投掷是否成功来判断抓握是否成功,TossingBot学会倾向于获得准确投掷的掌握。正如您从视频中看到的那样,学习过程本身相当聪明,机器人可以大多只是单独留下来自己解决问题,在14小时的训练时间内管理10,000次抓握和投掷尝试。
这个过程的一个重要组成部分是研究人员称之为“剩余物理学”,它提供了一种世界基线知识,以帮助TossingBot更快地学习和适应。

TossingBot使用深度神经网络,该网络以垃圾箱中物体的深度图像开始,然后通过成功的抓取和投掷训练自己。
当然,这项研究本身还存在一些局限性,同时,如果可以在视觉数据的基础上,引入其它数据,可能会让系统变得更加准确,更容易掌握新物体的投掷技巧。
TossingBot具有什么样的准确度,以及将物体投射更远距离意味着什么?将这种技术用于更大或更强大的武器是多么容易?
TossingBot在其自然范围之外的容器中的准确度为85%,每个容器的开口为25 x 15厘米。在模拟中,我们测试了更长距离(最长5米)的推广,并且该方法运行良好。但在现实世界中,最远的盒子离机器人只有2米左右。我们没有进行任何更远的测试,因为任何更难的投掷都会导致UR5机器人达到力 - 扭矩限制。我们的猜测是,由于物理学/弹道学的初步估计,该方法应该对更长的距离进行合理的推广。
TossingBot可能会首先以较低的准确度开始到这些更远的位置(由于意外的动态),但它应该很快适应新的训练样本,因为它继续进行在线学习。在使这种技术适用于更大和更强大的臂的方面,只要臂具有良好的可重复性(例如,制造中使用的那些)和实时控制,它应该是容易的。
显扬科技优势:
显扬科技是国家高新技术企业,在机器人、机器视觉方面有多年的研发与产业化经验,可为你提供完善的售后与保修服务,以及其他研发方面协作,并且提供专用移动机器人工作台。
显扬科技已成功销售Franka机器人、UR机器人、Robotiq夹具等产品给浙江大学,清华大学,哈尔滨工业大学等,获得了非常好的评价。显扬科技研发人员超过50人,精通UR,Franka,遨博机器人安装、调式、二次开发等,对基于协作机器人的各种应用开发已有超过8年经验。
关于显扬科技:
显扬科技(www.hinyeung.com)专注研发并产业化高速高清三维机器视觉设备、智能协作机器人系统。显扬科技创建了一个集高精度视觉传感器、智能协作机器人、智能感知与控制系统平台,让机器人更加智能、可靠,适用于更多复杂的应用场景。显扬科技研发的三维机器视觉设备精度能达亚微米级,三维数据采集帧率高达300帧,具有高精度、大景深、高稳定性的优势,已在多个领域成功替代进口同类产品。目前,显扬科技产品已成功应用于食品、电器、陶瓷、物流、教育科技、新零售等行业。显扬科技创始团队由香港中文大学数名博士组成,公司研发人员均来自海内外名校。公司知识产权超过50项,产品已经通过欧盟CE认证。显扬科技已完成投资与融资约5000万人民币。
显扬生态: UR优傲协作机器人 | AUBO遨博移动机器人 | Franka 协作机器人 | 艾利特协作机器人 | Kuka iiwa 协作机器人 | ABB工业机器人 | 海康工业镜头 | 海康工业相机 | 伯朗特工业机器人 | 爱普生Epson工业机器人 | robotiq夹爪 | robotiq真空吸盘 | robotiq腕部相机| 慧灵机器人电爪 | 研华工控机 |超恩工控机 | 创想三维3D打印机 | AGV | 机器人关节 | 精密机械加工服务
应用案例方向:1.三维机器视觉机器人引导系统 2.工业检测与测量系统3.教育行业解决方案4.智慧零售解决方案
应用场景:汽车制造行业 | 3C行业 | 电子电气 | 机械加工 | 液晶半导体 | 食品加工行业 | 医药行业 | 化工行业 | 教育行业 | 生活 | 其他行业
详询:18670025215(丁先生) www.hinyeung.com

