应用案例|基于三维机器视觉的机器人引导电动汽车充电头自动插拔应用方案
发布时间:2023-10-27 09:51:28 作者:显扬科技

Part.1 项目背景
类对减少温室气体排放、提高能源效率以及减少对化石燃料的依赖,加速了电动汽车的普及,然而,电动汽车的充电依然面临一些挑战。传统的电动汽车充电通常需要人工干预,插入和拔出充电头,这不仅可能导致操作错误,还会引起不必要的延误。
为了解决以上痛点,自动化充电技术应运而生。基于三维机器视觉的机器人系统可以实现电动汽车充电头的自动插拔,这种自动化应用不仅提供了便利性,还减少了人为操作错误和提高充电设备的利用率。

Part.2 解决方案
该解决方案由硬件配置、软件算法组成。
硬件配置:
机器人臂:具有足够的自由度和稳定性,以执行插拔操作。
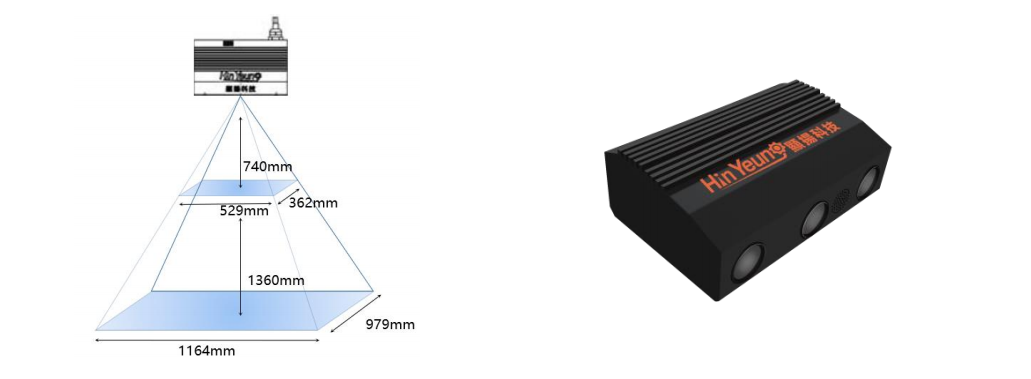
三维视觉传感器:选用显扬科技HY-M5三维视觉系统,该系统成像快、精度高,HY-M5扫描速度为10-300Hz,扫描精度能精确至±0.01mm,配合自研智能算法,能够快速准确获取汽车充电口和充电头的位置。
力传感器:安装在机器人臂的握持端,用于监测插拔过程中的力。
软件算法:
目标检测与跟踪:使用三维视觉传感器检测和跟踪电动汽车充电口和充电头的位置。
路径规划:根据目标位置信息规划机器人臂的插拔路径,确保不会损坏车辆或充电设备。
机器人控制:实现机器人的运动控制,确保准确地将充电头插入充电口。
异常处理:开发异常处理算法,以处理车辆位置不准确等问题。
Part.3 工作流程
1. 确定项目需求和目标:
确定自动插拔充电系统的性能要求,包括插拔时间、准确度、兼容性等。
确定项目的预算和时间表。
2. 设计机器人系统:
设计具有足够自由度和稳定性的机器人臂,以执行插拔操作。
选择合适的三维视觉传感器和力传感器。
定义机器人系统的整体架构,包括硬件和软件组件。
3. 开发软件算法:
开发目标检测与跟踪算法,使用三维视觉传感器来检测和跟踪电动汽车充电口和充电头的位置。
开发路径规划算法,以规划机器人臂的插拔路径,确保不会损坏车辆或充电设备。
开发机器人控制算法,实现机器人的运动控制,确保准确地将充电头插入充电口。
开发异常处理算法,以处理车辆位置不准确等问题。
4. 用户界面开发:
开发用户友好的界面,使用户可以启动充电、监视进度并停止充电。
集成安全功能,如急停按钮,以在紧急情况下停止操作。
Part.4 方案优势
1.视觉传感器体积紧凑,高精度,安装于轻型协作机器人上,灵活度高;
2.该项目部分应用场景处于室外或有环境光干扰的公共停车场内。HY-M5具备优异的抗环境光性能;
3.可对黑色且结构较为精密的充电口高质量成像并且兼容多种品牌的车型;
4.可引导机器人开启充电盖,定位充电位置并完成充电。
显扬科技由香港中文大学博士团队创建,主要研究并产业化高速高清三维机器视觉系统,以及智能工业机器人系统。其研发的三维机器视觉设备精度能达亚微米级,三维数据采集帧率高达310帧,此外还具有高精度、大景深、高稳定性的优势,可实现高效率机器人引导,以及工业检测与测量。显扬科技的产品主要应用在对采集速度要求较高的快速工业产线、物流枢纽以及对测量精度要求高的精密制造、军工航天、半导体产业等。


