艾利特EC612机器人用户坐标设定
发布时间:2022-03-18 20:23:48 作者:显扬科技
艾利特EC612智能轻型 6 自由度模块化协作机器人,有效负载 12kg,为艾利特模块化协作机器人系列之一。艾利特协作机器人系列采用关节模块化设计,使用面向开发者层面的机器人系统。用户可根据艾利特协作机器人平台提供的应用程序接口,开发属于自己的机器人控制系统。
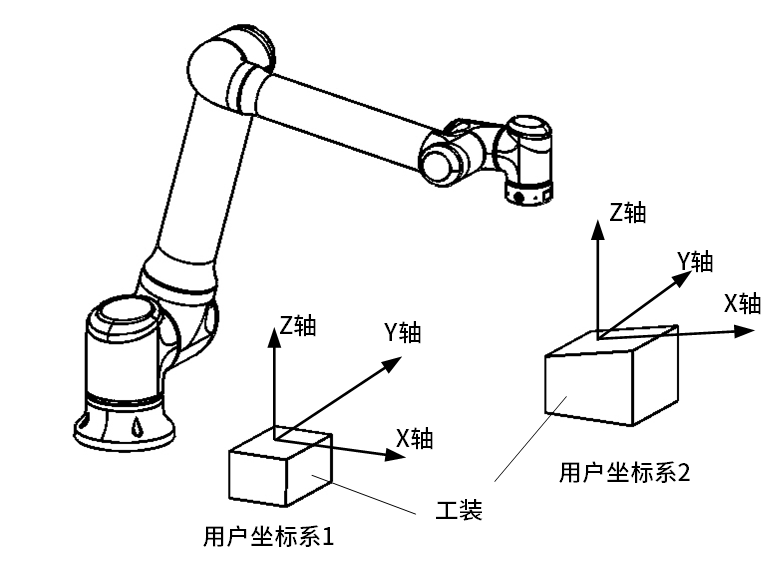
此外,艾利特协作机器人配有专用的可编程操作界面,用户可通过此界面实时观察机器人的运行状态,对机器人进行诸多控制设置,也可脱机进行离线仿真,极大地提升了实际应用的工作效率。建立艾利特机器人用户坐标系,可以方便示教编程时使用。如图1所示,有几个工装面就需要设置几个用户坐标系。
设定步骤为:
1. 选择“运行准备 > 用户坐标”,进入用户坐标设定界面。
2. 选中需要设定的当前用户坐标号 。
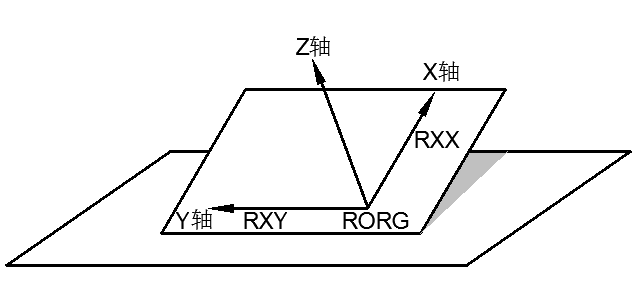
3. 光标选中界面上的点“RORG”,示教好需要的点位。
4. 点击子菜单栏的“记录点”即完成了该点的记录(记录过位置的点会由红色变为绿色)。
5. 依次完成RXX、RXY点位的记录。
6. 点击“计算”即可生成相应的用户坐标。
按下安全开关,点击“运行RORG/运行RXX/运行 RXY”即可将机器人运行到相应的点位。
用户也可通过直接输入“X、Y、Z、Rx、Ry、Rz”的值,再点击界面下方的“确定”来设置用户坐标。
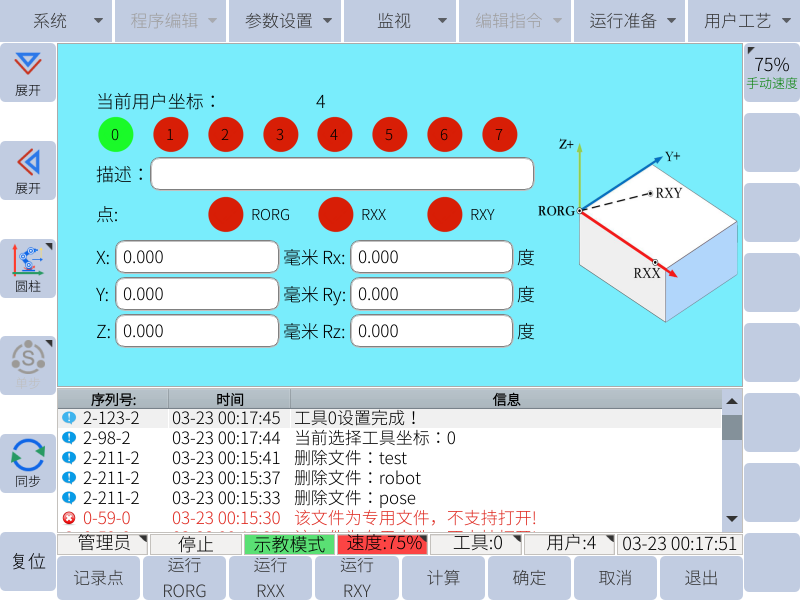
图 6-50 : 用户坐标设定界面
显扬科技通过自主研发的高速高清三维机器视觉设备,以及智能工业机器人系统,联合多个知名机器人与机器人夹具企业,构建了一个机器人生态系统。显扬生态的产品能够完美的与显扬科技的机器视觉产品结合,包含通信协议、图形处理SDK、操作案例等。显扬科技同时是这些企业的代理商,可以提供可靠、性价比高的产品。目前显扬科技生态系统包括以下品牌:UR优傲协作机器人 、AUBO遨博移动机器人、Franka Emika 协作机器人、艾利特Elite协作机器人、Kuka iiwa 协作机器人、ABB工业机器人、海康工业镜头 、海康工业相机、伯朗特工业机器人、 爱普生Epson工业机器人、 robotiq夹爪 、robotiq真空吸盘、robotiq腕部相机、慧灵机器人电爪 、大寰机器人电爪、研华工控机、超恩工控机、创想三维3D打印机 、Mir AGV、机器人关节、精密机械加工服务。通过显扬生态,客户可以快速找到合适的机器人本体、夹具等,并快速部署基于显扬三维机器视觉产品的工业应用。

销售对接:18670025215(微信同号)
采购对接:17788781937(微信同号)
点击进入官方淘宝店铺
点击进入官方爱采购店铺

