大寰AG-145夹爪概况及安装指南
发布时间:2022-03-03 15:08:47 作者:显扬科技
大寰AG-145 两指自适应夹爪是一款先进的自适应两指夹爪机械手,具有0-145mm 以及15-95N 的大行程、大抓持力特性。可对关节手指位置、速度和抓取力进行精确控制,支持抓取不同软硬、不同重量的物体。采用多连杆结构设计的手指,可以进行平行、包络抓取,可适用于不同大小、形状的物体,从而使抓取更稳定,更安全。
下图为 AG-145 夹爪结构示意图,标注了 AG-145 夹爪的各个组成部分,方便用户对 AG-145 夹爪的组成部分有相应的了解。
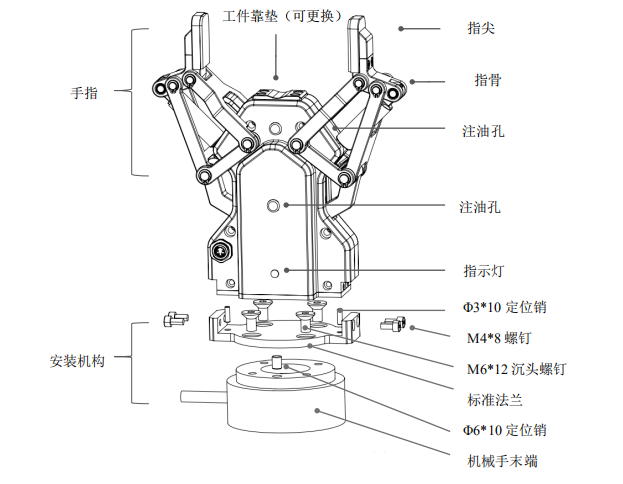
图1 AG-145 夹爪结构示意图
一、机械安装
第一步:如下图2所示,将标准法兰安装在机械手臂末端。
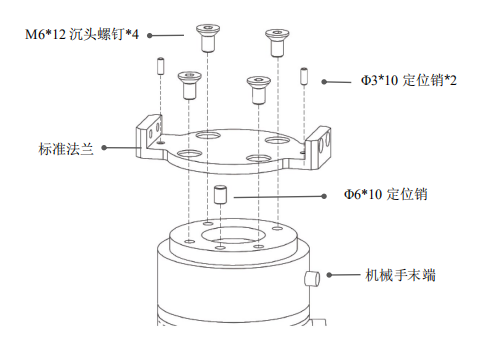
图2 安装标准法兰
第二步:如图3 所示,将 AG-145 夹爪安装在法兰盘上,并锁紧两侧螺丝。
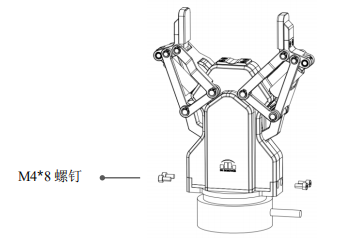
图3 安装 AG-145 夹爪
夹爪安装方式说明
·安装 Φ6*10 定位销,将法兰与机械手末端精准定位。
·锁紧 M6*12 沉头螺钉,将法兰固定。
·安装 Φ3*10 定位销,为 AG-95 夹爪提供定位。
二、电气安装
AG-145 两指自适应夹爪,采用 CAN 总线通讯方式进行通讯,它支持 CAN2.0A 版本。 对于不支持 CAN 总线的环境,我们在产品清单提供了通讯协议转换器, 用于将其他通讯协议(USB、TCP/IP、RS485、I/O 等)转换到 CAN2.0A,从而支持不同的 通讯协议与控制器(PC/PLC/机器人)连接。如果系统本身支持 CAN 总线,您也可以直接将夹爪连接到系统,而不需要使用通讯协议转换器。
夹爪电气连接说明
·使用我司提供的航插线缆连接夹爪与通讯协议转换器。
·将电缆弯曲的一端插入夹具端;将电缆的直端插入转换器。
·Ethernet、RS485、USB、IO、CAN 以及电源的接口已经分别在通讯协议转换器侧板上标出,用户可根据需求将相应端口与控制器相连。
您可参照电气连接示意图对夹爪进行通信连接(如图4 所示)
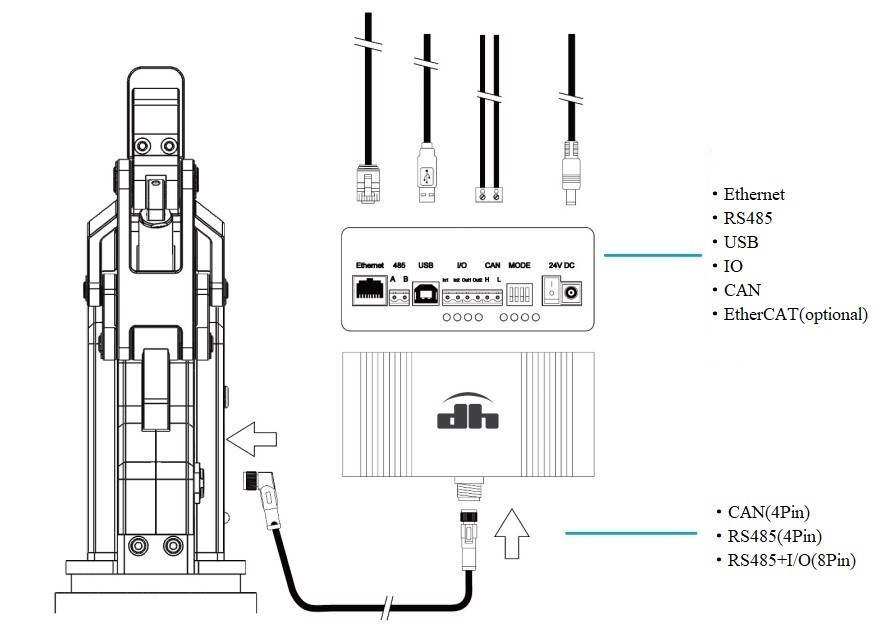
图4 电气连接示意图
我们以 Ethernet 连接为例,对通讯连接转换器进行连接,如图 5 所示。
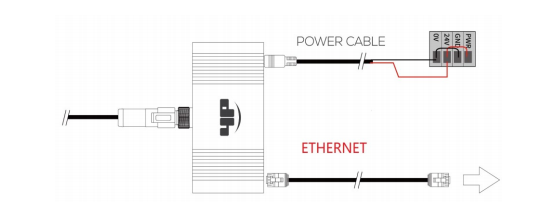
图5 Ethernet 连接说明图
Ethernet 连接说明
·将电源电缆的黑色线缆连接至电源 0V 电源端。
·将电源电缆的红色线缆连接至电源 24V 电源端。
·将以太网线连接通讯协议转换器与机器人控制器/上位机接口。
显扬科技是大寰夹爪官方代理商,提供稳定可靠大寰夹爪,并能够提供配套的软件,为客服提供充足的售后保障,原厂售后、保修服务等。显扬科技众多高校以及众多中小型企业等提供了多台大寰夹爪,客户满意度极高。显扬科技对教育科研领域提供优惠,为客户提供低价采购大寰夹爪的渠道。
显扬科技通过自主研发的高速高清三维机器视觉设备,以及智能工业机器人系统,联合多个知名机器人与机器人夹具企业,构建了一个机器人生态系统。显扬生态的产品能够完美的与显扬科技的机器视觉产品结合,包含通信协议、图形处理SDK、操作案例等。显扬科技同时是这些企业的代理商,可以提供可靠、性价比高的产品。目前显扬科技生态系统包括以下品牌:UR优傲协作机器人 、AUBO遨博移动机器人、Franka Emika 协作机器人、艾利特Elite协作机器人、Kuka iiwa 协作机器人、ABB工业机器人、海康工业镜头 、海康工业相机、伯朗特工业机器人、 爱普生Epson工业机器人、 robotiq夹爪 、robotiq真空吸盘、robotiq腕部相机、慧灵机器人电爪 、大寰机器人电爪、研华工控机、超恩工控机、创想三维3D打印机 、Mir AGV、机器人关节、精密机械加工服务。通过显扬生态,客户可以快速找到合适的机器人本体、夹具等,并快速部署基于显扬三维机器视觉产品的工业应用。

上一篇:艾利特EC612机器人示教器如何使用?
下一篇:Franka机器人的注意事项

