珞石经销商—珞石协作机器人xMate3的标定方法
发布时间:2021-12-06 18:36:33 作者:显扬科技
上一篇文章我们了解了什么是零点标定,现在我们来学习关于珞石协作机器人xMate3的标定方法吧。
首先要了解软定标和机械标定。
软标定是指一种快速标定机器人零点的方法,xMate 柔性协作机器人在机器人本体各关节处留有视觉标定三角槽,缓慢转动关节,当关节两侧的三角槽对齐时,则标志着该关节的机械零点位置确定。例如下图1轴视觉标定三角对齐举例所示。
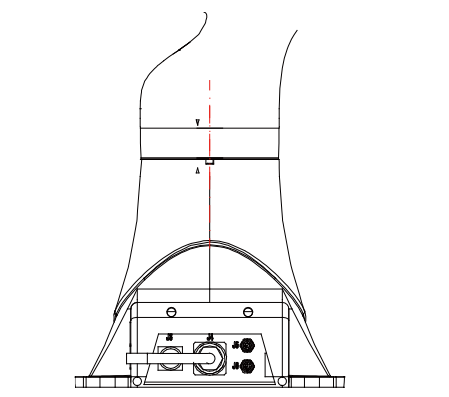
(图1 轴视觉标定三角对齐)
xMate 3 机器人第一轴至第四轴采用销钉与键槽配合的标定方式,第五轴至第七轴采用键槽标定方式。每次只允许标定一个轴,具体操作过程如下:步骤 1:取下橡胶圈
xMate 3 机器人本体各轴回转位置装有黑色橡胶套,标定前需将各轴的橡胶套拨放至连杆上-。
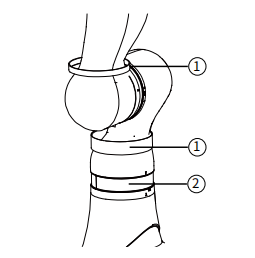
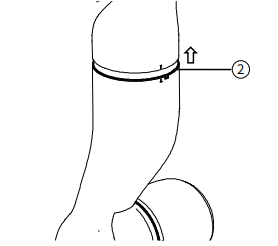
步骤 2:取下一轴位置塑料壳
一轴位置塑料壳可按照图示方向取下,漏出标定销。
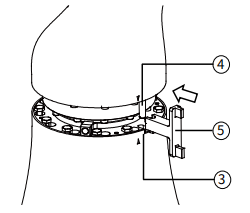
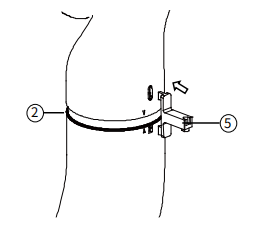
步骤 3:标定一轴
缓慢旋转一轴,当标定销对准标定槽孔时,利用专用标定工具按照图示方向尝试插入槽孔和销轴中,若未能同时插入销轴和槽孔,则继续缓慢旋转一轴调整,直至同时插入时,认为该轴零点机械标定完成。
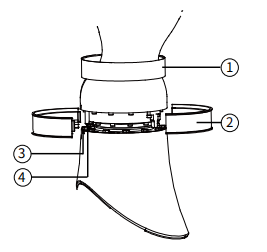
步骤 4:标定二到四轴
将二到四轴的塑料环按照图示方向推进连杆后,同样按照步骤 3 的方式进行标定。
步骤 5:标定五到七轴
参照步骤 3 标定五轴到七轴,注意专用标定工具的使用方向与步骤 3 相反。
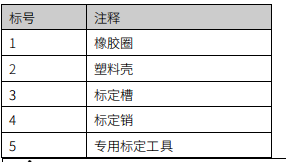
图中1.2.3.4.5
显扬科技3D视觉专注研发并产业化高速高清三维机器视觉设备、智能协作机器人系统。目前,显扬科技3D视觉自主研发的三维机器视觉兼容多种品牌的机器人并已成功应用于食品、电器、陶瓷、物流、教育科技、新零售等行业。此外,显扬科技生态系统包括以下品牌:UR优傲协作机器人 、AUBO遨博移动机器人、Franka Emika 协作机器人、艾利特Elite协作机器人、Kuka iiwa 协作机器人、ABB工业机器人、海康工业镜头 、海康工业相机、伯朗特工业机器人、 爱普生Epson工业机器人、 robotiq夹爪 、robotiq真空吸盘、robotiq腕部相机、慧灵机器人电爪 、大寰机器人电爪、研华工控机、超恩工控机、创想三维3D打印机 、Mir AGV、机器人关节、精密机械加工服务。


