显扬科技艾利特机器人成都实力代理商丨艾利特机器人硬件组成
发布时间:2021-11-10 20:33:39 作者:显扬科技

如图1 所示,EC66协作机器人系统主要由机器⼈本体、控制箱(可选多种型号控制 箱)、和示教器组成。机器人本体模仿⼈的⼿臂,共有6 个旋转关节,每个关节表示1个自由度。
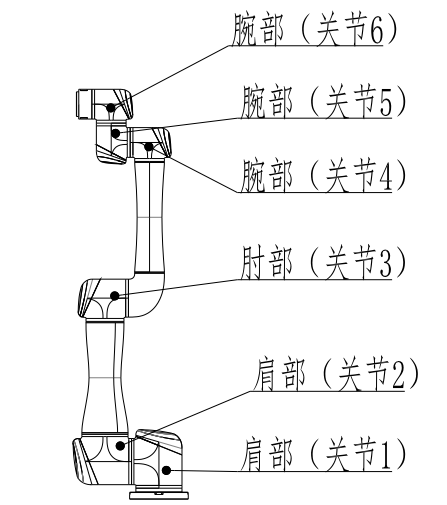
如图 2所示,机器人关节包括肩部(关节 1),肩部(关节 2),肘部(关节 3),腕部 1(关节 4),腕部 2 (关节 5)和腕部 3(关节 6)。
基座⽤于机器人本体和底座连接,⼯具端⽤于机器人与⼯具连接。肩部和肘部之间以及肘部和腕部之间采⽤臂管连接。通过示教器操作界⾯或拖动示教功能,⽤户可以控制各个关节转动,使机器人末端⼯具移动到不同的位姿。
显扬科技(hinyeung.com)由香港中文大学博士团队创建,是国家高新技术企业。公司主要研发并产业化高速高清三维机器视觉系统、智能工业机器人系统,目前产品三维采集速度高达每秒300帧,最高精度亚微米级,已在多个领域成功替代进口同类产品。显扬科技产品可实现高效率机器人引导,以及工业检测与测量。显扬科技的产品主要应用在物流行业、汽车行业、3C行业,以及对测量精度要求高的精密制造、军工航天、半导体产业等。显扬科技目前已累计获得投资约5000万人民币,申请及授权超过50项知识产权,产品通过欧盟CE认证,已在多个知名企业得到应用。显扬科技与国内外知名企业,如显扬科技已代理UR,Franka,ABB,遨博,Robotiq、Photoneo等机器人产品,并推出了基于多种工业机器人的三维机器视觉系统。
详询:18670025215(丁先生) www.hinyeung.com

