双目视觉的成像理论
发布时间:2022-09-12 14:07:13 作者:显扬科技
双目视觉是机器视觉的一种重要形式,通过模拟人类双眼感知外界物体的位置信息,输送给大脑并分析出该物体在空间中的位置过程,双目视觉是利用电脑设备被动感知物体空间信息。双目视觉系统相对于单目视觉的优点主要是它存在视差,可以利用该视差来恢复物体的深度信息。它的核心是从至少两个及以上的观测点拍摄物体,得到同时包含物体的左右两幅图像,并根据数学模型之间坐标系相互关系,求解物体的空间几何位置。
摄像机的成像模型
为了处理三维图像和二维图像之间的映射关系,需要在映射中加入摄像机产生图像过程的投影特性。针孔摄像机模型是图像处理人员常用的模型之一。该模型简单易懂,能满足日常的开发需求。
该模型成立的必要条件是光线沿直线传播,由P点光源发出的光线经过光心后将会在另一面呈现出倒立点p,其中f为焦距,S为光源与光心间的距离。根据三角形相似关系,即可求解相应参数,这就是小孔成像的原理。而摄像机一般是由多组透镜构成,但基本原理与之相同。该模型确定了现实世界中目标物体的三维图像与投影平面上的二维图像之间的映射关系,是后续三维信息恢复与重构的基础。
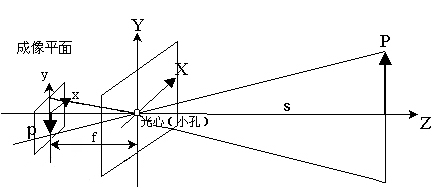
小孔成像原理
摄像机成像的线性模型
线性模型是基于理想情况下的映射关系,在双目立体视觉中,主要根据四个坐标系建立空间点与图像点之间的映射关系,即图像像素坐标系、图像物理坐标系、摄像机坐标系、世界坐标系。各坐标系的关系如图1所示。
对于任何物体的衡量都是相对的,都需要选择一个基准,因此建立世界坐标系(OW-XWYWZW)来衡量空间中摄像机和目标物体的空间位置是不可或缺的。因为世界坐标系是变化的,故想要直接确定图像平面与世界坐标系之间的相对位姿关系是困难的。
提前做个假设:假设摄像机的内部结构不会因为外部环境的变化而变化,如此小孔成像模型的透视投影中心就是确定不变的,换言之,其相对于成像平面的位置是可以被确定的。以光心为基准建立摄像机坐标系OC-XCYCZC,如下图所示。ZC轴为指向摄像机视线方向,与摄像机的光轴重合,XC、YC轴分别平行于图像平面的横向、纵向。光轴与图像平面的交点记为o,称为图像平面的主点。
为了在图像像素坐标系和摄像机坐标系之间建立联系,需要在图像平面上建立一个过渡坐标系,称之为图像物理坐标系。图像物理坐标系的原点为o,坐标的横轴和纵轴分别与图像平面横轴和纵轴平行。图像物理坐标系的建立将无量纲像素值与物理单位建立了联系。在计算机内部,所有数字图形通常都是根据图像的分辨率以数组形式存储,数组中的元素表示图像点的灰度值。
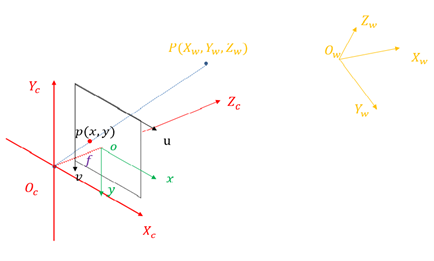
坐标系之间的几何关系
显扬科技由香港中文大学博士团队创建,主要研究并产业化高速高清三维机器视觉系统,以及智能工业机器人系统。其研发的三维机器视觉设备精度能达亚微米级,三维数据采集帧率高达310帧,此外还具有高精度、大景深、高稳定性的优势,可实现高效率机器人引导,以及工业检测与测量。显扬科技的产品主要应用在对采集速度要求较高的快速工业产线、物流枢纽以及对测量精度要求高的精密制造、军工航天、半导体产业等。

销售对接:18670025215(微信同号)
采购对接:17788781937(微信同号)

