探索UR机器人 | UR16e机器人的工作空间及安装说明
发布时间:2021-12-03 18:36:13 作者:显扬科技
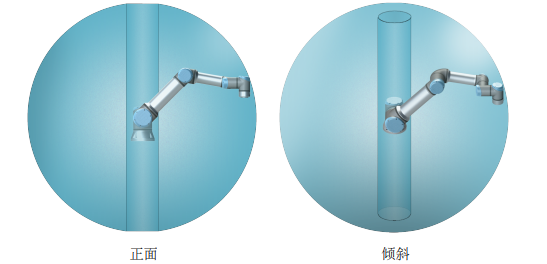
UR16e机器人工作空间延伸900mm基座关节周围选择机器人安装位置时,务必考虑机器人正上方和正下方的圆柱体空间。应避免将工具移向圆柱体空间,因为这样会造成工具慢速运动时关节却运动过快,从而导致机器人工作效率低下,风险评估难以进行。
UR16e机器人手臂使用4颗8.8级强度的M8螺栓和底部的4个8.5mm安装孔安装机器人手臂。螺栓必须使用20Nm扭矩拧紧。
使用预留的两个Ø8孔和一个销钉来准确地重新定位机器人手臂。注意:可以采购精确的基座作为附件来使用。图4.1显示了钻孔位置和螺丝安装位置。
将UR16e机器人安装在一个坚固、无震动的表面,该表面应当足以承受至少10倍的基座关节的完全扭转力,以及至少5倍的机器人手臂的重量。如果UR16e机器人安装在线性轴上或是活动的平台上,则活动性安装基座的加速度非常低。高加速度会导致机器人发生安全停机。
确保UR16e机器人手臂正确并安全地安装到位。安装不稳定会导致事故。

机器人安装孔。使用4颗M8螺栓。所有测量值均以mm为单位
将UR16e机器人安装在适合IP等级的环境中。机器人不得在超过与机器人(Ip54)、示教盒(IP54)和控制箱(IP44)的IP等级相当的环境中运行。
UR16e机器人工具法兰有四个M6螺纹孔,可用于将工具连接到机器人。M6螺栓必须使用8Nm的扭矩拧紧,其强度等级为8.8。为了准确地重新定位工具,请在预留的Ø6个孔中使用销钉。下图显示了工具法兰的尺寸和孔模式。建议对销钉使用径向槽孔以避免过度约束,同时保持精确的位置。安装工具的螺栓不得超过8mm。M6螺栓太长将压在工具法兰的底部并使机器人短路。
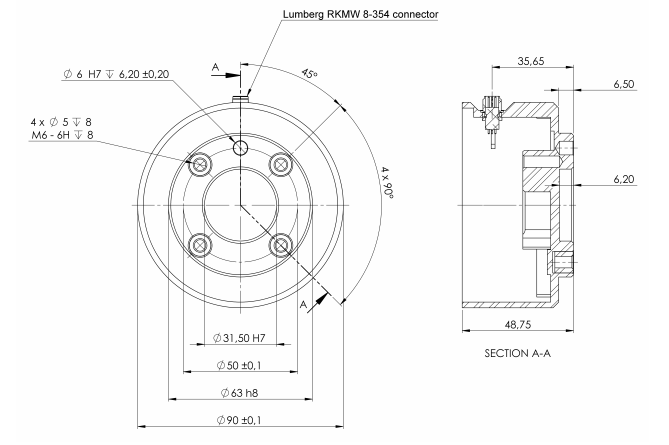
工具输出法兰(ISO9409-1-50-4-M6)是机器人顶端的工具安装位置。所有测量值均以mm为单位
需要注意以下几点:
1.确保工具正确并安全地安装到位。
2.确保工具安全架构,不会有零件意外坠落造成危险。
3.在机器人上安装一个带有延伸超过8毫米M6螺栓的工具可能会推入工具法兰并造成无法修复的损坏,从而导致更换端部接头。
控制箱可悬挂在墙壁上,也可安放在地面上。控制箱每侧应保留50mm的空隙,以确保空气流通顺畅。示教盒可以悬挂在墙壁或控制箱上。确认电缆不会引起绊倒危险。您可以购买用于安装控制箱和示教盒的额外支架。
需要注意以下几点:
1.确保控制箱、示教盒和电缆不接触液体。潮湿的控制箱可导致致命伤害。
2.将示教盒(IP54)和控制箱(IP44)放置在适合IP等级的环境中。
UR16e机器人手臂的最大允许有效载荷取决于重心偏移,参见下图。重心偏移定义为工具输出法兰的中心与附加的有效载荷重心之间的距离。
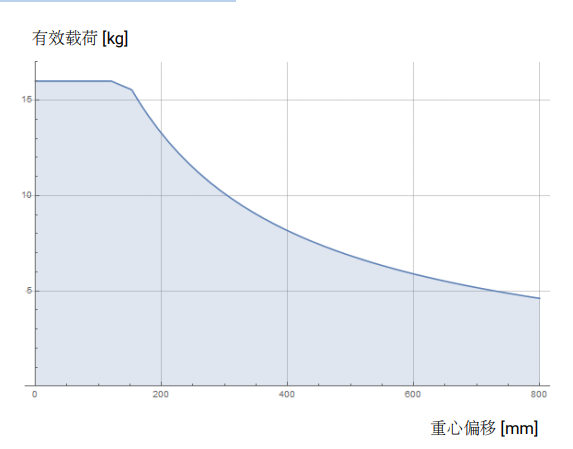
最大允许有效载荷与重心偏移之间的关系
显扬科技专注研发并产业化高速高清三维机器视觉设备、智能协作机器人系统,使命是“让人类高效地用好机器人”。目前,显扬科技自主研发的三维机器视觉兼容多种品牌的机器人并已成功应用于食品、电器、陶瓷、物流、教育科技、新零售等行业。此外,显扬科技生态系统包括以下品牌:UR优傲协作机器人 、AUBO遨博移动机器人、Franka Emika 协作机器人、艾利特Elite协作机器人、Kuka iiwa 协作机器人、ABB工业机器人、海康工业镜头 、海康工业相机、伯朗特工业机器人、 爱普生Epson工业机器人、 robotiq夹爪 、robotiq真空吸盘、robotiq腕部相机、慧灵机器人电爪 、大寰机器人电爪、研华工控机、超恩工控机、创想三维3D打印机 、Mir AGV、机器人关节、精密机械加工服务。


