探索UR机器人 | 安装UR机器人手臂和控制箱
发布时间:2021-12-02 15:13:57 作者:显扬科技
请按照以下步骤UR安装机器人手臂和控制箱:
1.开箱取出机器人手臂和控制箱。
2.将机器人安装在一个坚固的表面,该表面应当足以承受至少10倍的机座关节的完全扭转力,以及至少5倍的机器人手臂的重量。该表面必须是防震的。
3.将控制箱放置在其支脚上。
4.将机器人和控制箱之间的机器人电缆插上电源。
5.插入控制箱的市电插头。
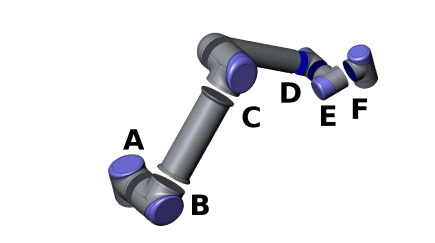
机器人关节A:基座,B:肩部,C:肘部和D、E、F:手腕1、2、3
倾翻的危险如果机器人没有安全地放置在坚固的表面上,机器人有可能会倾倒并造成伤害。
开/关控制箱
按带触摸屏的控制板前侧的电源按钮即可打开控制箱。该控制板通常被称为示教盒。接通控制箱后,来自隐藏的操作系统的文本就会出现在触摸屏上。约一分钟后,屏幕上将显示一些按钮,并弹出一个窗口,引导用户转至初始化屏幕。按屏幕上的绿色电源按钮或使用欢迎屏幕上的关闭按钮可关闭控制箱。
直接从壁式插座上拔下电源线来关闭系统可能导致机器人文件系统损坏,从而可能致使机器人功能出现故障。
开/关机器人手臂
如果控制箱已打开且所有紧急停止按钮都未激活,即可开启机器人手臂。开启方法是,在初始化屏幕中,触摸屏幕上的开按钮,然后按启动。当启动机器人后,制动器被解锁,机器人发出噪音并移动少许位置。
触摸“初始化”屏幕上的关按钮可关闭机器人手臂的电源。关闭控制箱也可自动关闭机器人手臂的电源。
快速启动
为了快速启动已安装好的机器人,请进行如下操作:
1.按示教盒前侧的“紧急停止”按钮。
2.按示教盒上的电源按钮。
3.等待一分钟,系统会启动,触摸屏上将显示文字。
4.系统就绪后,触摸屏上将弹出一个窗口,提示机器人需要进行初始化。
5.触摸弹出窗口上的按钮。你将会被转至初始化屏幕。
6.等待出现确认应用的安全配置对话框,按下确认安全配置按钮。这适用于需要根据风险评估进行调节的初始参数集。
7.解锁紧急停止按钮。机器人状态从紧急停止变成关闭电源。
8.请站在机器人可触及的范围(工作空间)之外。
9.触摸触摸屏上的开按钮。等待几秒钟,直至机器人状态变成空闲。
10.请确认有效荷载和所选的安装正确。如果基于传感数据的安装与所选的安装不一致,将有提示出现。
11.触摸触摸屏上的启动按钮。此时,制动器即会解锁,机器人会发出噪音并移动少许位置。
12.触摸确定按钮,转至欢迎屏幕。
显扬科技专注研发并产业化高速高清三维机器视觉设备、智能协作机器人系统,使命是“让人类高效地用好机器人”。目前,显扬科技自主研发的三维机器视觉兼容多种品牌的机器人并已成功应用于食品、电器、陶瓷、物流、教育科技、新零售等行业。此外,显扬科技生态系统包括以下品牌:UR优傲协作机器人 、AUBO遨博移动机器人、Franka Emika 协作机器人、艾利特Elite协作机器人、Kuka iiwa 协作机器人、ABB工业机器人、海康工业镜头 、海康工业相机、伯朗特工业机器人、 爱普生Epson工业机器人、 robotiq夹爪 、robotiq真空吸盘、robotiq腕部相机、慧灵机器人电爪 、大寰机器人电爪、研华工控机、超恩工控机、创想三维3D打印机 、Mir AGV、机器人关节、精密机械加工服务。


